Was ist eigentlich Arduino?
Arduino ist ein bekannter Mikrocontroller Hersteller, der viele verschiedenen Varianten von Mikrocontrollern auf dem Mark anbietet. Darüber hinaus wird auch eine dazugehörige Plattform zum programmieren der Kontroller angeboten.
Sowohl die Schaltpläne als auch die Software stehen Open-Source zur Verfügung.
Damit ist es möglich einfach und schnell Programmier- sowie Elektronikprojekte umzusetzen.
Installation
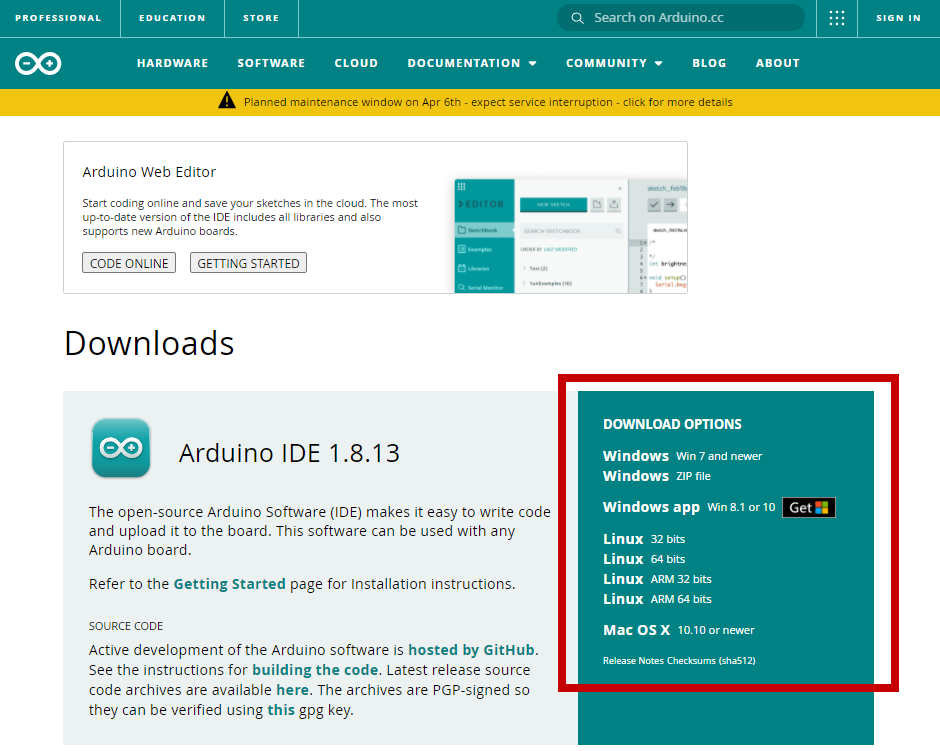
Zum Programmieren der Morph3dbot-Circuits, kann die Arduino IDE (integrated development enviroment) genutzt werden. Diese findet man hier www.arduino.cc/en/software kostenlos zum download. Nachdem man die passende Installationsdatei für seinen Rechner gewählt hat, führt man diese aus und installiert die Arduino-Software und die USB-Treiber für die Mikrokontroller.
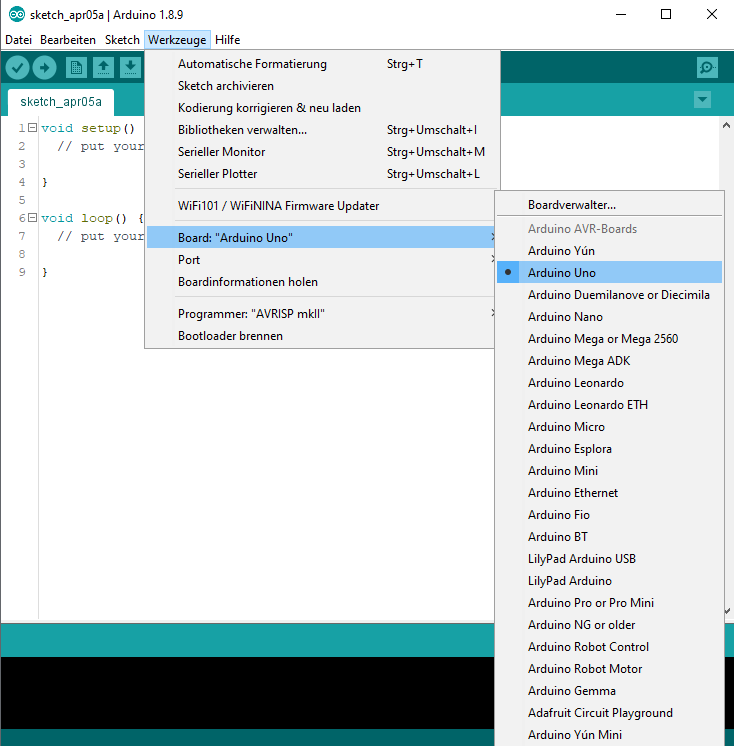
Nach Abschluss des Installations-Wizard, kann die Software ausgeführt und einige wichtige Einstellungen vorgenommen werden. Damit die Platine des Roboters richtig erkannt und bespielt werden kann, muss dies unter Werkzeuge > Board eingestellt werden. Dafür wird in der dort hinterlegten Liste einfach der Punkt “Arduino Uno” ausgewählt.
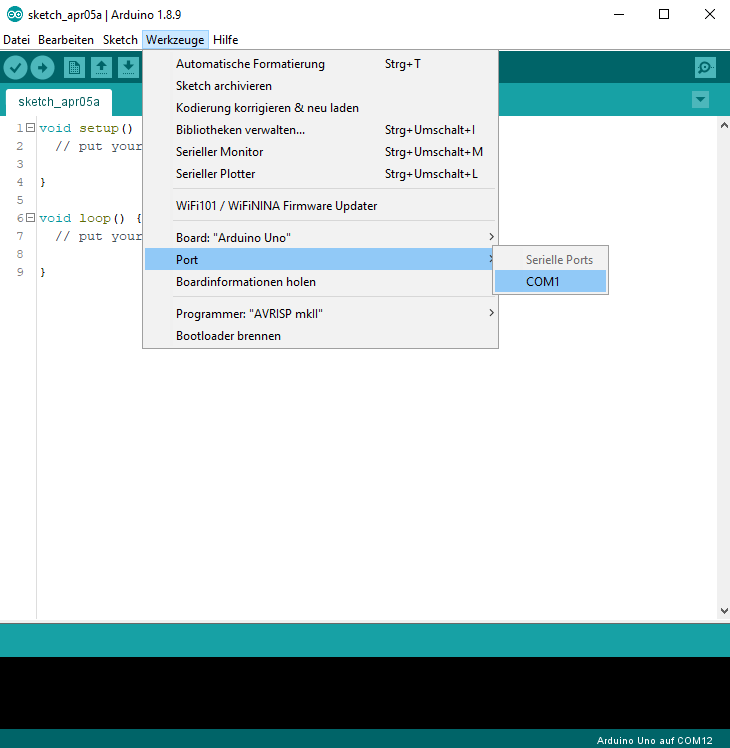
Damit der Mikrocontroller auch wie vorgesehen mit dem Computer kommunizieren kann, muss außerdem der Port gewählt werden über den dies geschieht. Dazu muss, falls bisher noch nicht geschehen, die Platine per USB-Kabel mit dem PC verbunden werden und, im besten Fall, direkt von diesem erkannt werden. Danach kann unter Werkzeuge > Port der entsprechende ausgewählt werden. Sollten hier mehrere auswählbar und nicht eindeutig zuordbar sein, kann der richtige Port mit einem Trick identifiziert werden.
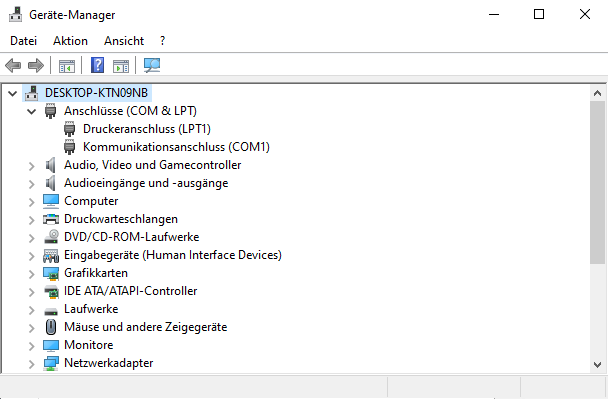
Dazu wird der Gerätemanager geöffnet und der Menüpunkt Anschlüsse (COM & LPT) angeklickt. Hier sollte sich die gleiche Liste wie im Arduino-Port-Menü befinden. Wird die Kabelverbindung der Platine zum Computer kurz unterbrochen und wiederhergestellt aktualisiert sich die Liste und man kann beobachten welcher Port verschwindet und wieder neu belegt wird. Anschließend kann in der Arduino IDE wieder unter Werkzeuge > Ports der nun richtige ausgewählt werden.
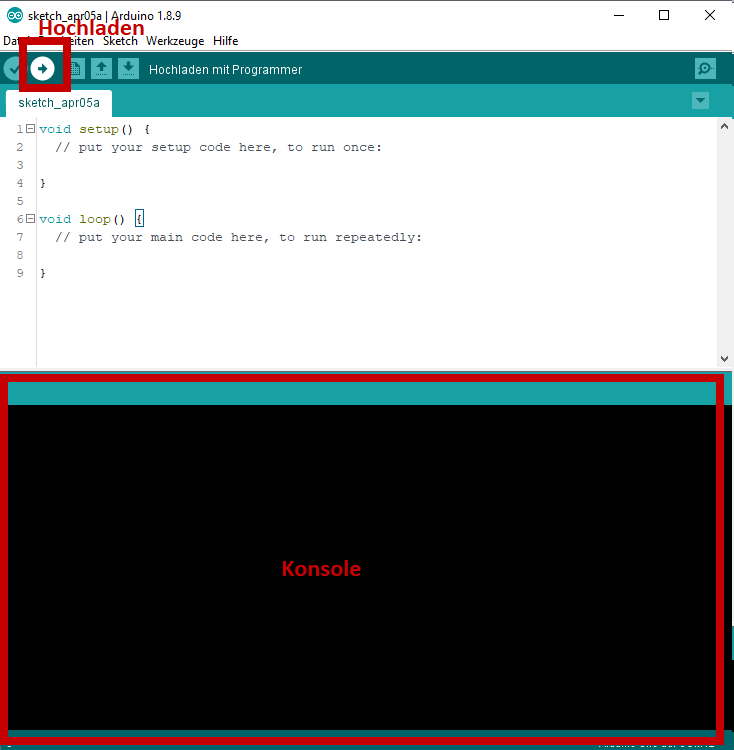
Ein kurzer Test kann zeigen ob alles einwandfrei eingerichtet wurde: Hierfür wird ein unbearbeitetes Projekt (sollte beim ersten starten der Software automatisch erzeugt werden, sonst Datei > Neu anklicken) auf die Platine des Roboters geladen. Dafür müssen natürlich wie oben beschrieben, die Platine per USB-Kabel mit dem Computer verbunden sein und Board, sowie Port richtig eingestellt sein. Eine Übertragung des Programmcodes an die Platine erfolgt über den Hochladen-Button in der oberen linken Ecke des Fensters. Die Konsole der Arduino IDE sollte nun Nachrichten diesbezüglich ausgeben, an deren Ende ein “Übertragung erfolgreich” stehen sollte. In diesem Fall wurde der hier nicht vorhandene Code auf die Platine geladen und diese könnte nun vom USB-Kabel getrennt werden.
Nun ist es Zeit die ersten Schritte für die Programmierung in Angriff zu nehmen.
Link: Tutorial 2